Adapun tujuan dari projek ini
diantaranya:
1. Memenuhi
syarat untuk Modul 4 Praktikum Mikrokontroler & Mikroprosesor.
2. Untuk
mengurangi kemungkinan terjadi perampokan pada brankas.
3. Untuk meningkatkan sistem keamanan pada brankas.
a. Alat dan Bahan:
- Breadboard

- Jumper Wire

- Potensiometer

- Power Supply

b. Mikrokontroller:
- Arduino UNO

c. Input:
- Sensor IR (Infra Red)

- Sensor PIR (Passive Infra Red)

- Sensor RFID (Radio Frequency Identification)

d. Output:
- Buzzer

- LCD 16x2
- Motor Servo

- Traffic Light Module

3. Dasar Teori[Back]

Gambar 3.1 Potensiometer
Potensiometer adalah salah satu jenis Resistor yang Nilai Resistansinya dapat diatur sesuai dengan kebutuhan Rangkaian Elektronika ataupun kebutuhan pemakainya. Potensiometer merupakan Keluarga Resistor yang tergolong dalam Kategori Variable Resistor. Secara struktur, Potensiometer terdiri dari 3 kaki Terminal dengan sebuah shaft atau tuas yang berfungsi sebagai pengaturnya. Gambar dibawah ini menunjukan Struktur Internal Potensiometer beserta bentuk dan Simbolnya.
Pada dasarnya bagian-bagian penting dalam Komponen Potensiometer adalah:
Penyapu atau disebut juga dengan Wiper
Element Resistif
Terminal
Berdasarkan bentuknya, Potensiometer dapat dibagi menjadi 3 macam, yaitu:
Potensiometer Slider, yaitu Potensiometer yang nilai resistansinya dapat diatur dengan cara menggeserkan Wiper-nya dari kiri ke kanan atau dari bawah ke atas sesuai dengan pemasangannya. Biasanya menggunakan Ibu Jari untuk menggeser wiper-nya.
Potensiometer Rotary, yaitu Potensiometer yang nilai resistansinya dapat diatur dengan cara memutarkan Wiper-nya sepanjang lintasan yang melingkar. Biasanya menggunakan Ibu Jari untuk memutar wiper tersebut. Oleh karena itu, Potensiometer Rotary sering disebut juga dengan Thumbwheel Potentiometer.
Potensiometer Trimmer, yaitu Potensiometer yang bentuknya kecil dan harus menggunakan alat khusus seperti Obeng (screwdriver) untuk memutarnya. Potensiometer Trimmer ini biasanya dipasangkan di PCB dan jarang dilakukan pengaturannya.
Sebuah Potensiometer (POT) terdiri dari sebuah elemen resistif yang membentuk jalur (track) dengan terminal di kedua ujungnya. Sedangkan terminal lainnya (biasanya berada di tengah) adalah Penyapu (Wiper) yang dipergunakan untuk menentukan pergerakan pada jalur elemen resistif (Resistive). Pergerakan Penyapu (Wiper) pada Jalur Elemen Resistif inilah yang mengatur naik-turunnya Nilai Resistansi sebuah Potensiometer.
Elemen Resistif pada Potensiometer umumnya terbuat dari bahan campuran Metal (logam) dan Keramik ataupun Bahan Karbon (Carbon). Berdasarkan Track (jalur) elemen resistif-nya, Potensiometer dapat digolongkan menjadi 2 jenis yaitu Potensiometer Linear (Linear Potentiometer) dan Potensiometer Logaritmik (Logarithmic Potentiometer).
Dengan kemampuan yang dapat mengubah resistansi atau hambatan, Potensiometer sering digunakan dalam rangkaian atau peralatan Elektronika dengan fungsi-fungsi sebagai berikut:
Sebagai pengatur Volume pada berbagai peralatan Audio/Video seperti Amplifier, Tape Mobil, DVD Player.
Sebagai Pengatur Tegangan pada Rangkaian Power Supply
Sebagai Pembagi Tegangan
Aplikasi Switch TRIAC
Digunakan sebagai Joystick pada Tranduser
Sebagai Pengendali Level Sinyal

Gambar 3.2 Motor Servo
Motor servo adalah sebuah perangkat atau aktuator putar (motor) yang dirancang dengan sistem kontrol umpan balik loop tertutup (servo), sehingga dapat di set-up atau di atur untuk menentukan dan memastikan posisi sudut dari poros output motor. motor servo merupakan perangkat yang terdiri dari motor DC, serangkaian gear, rangkaian kontrol dan potensiometer. Serangkaian gear yang melekat pada poros motor DC akan memperlambat putaran poros dan meningkatkan torsi motor servo, sedangkan potensiometer dengan perubahan resistansinya saat motor berputar berfungsi sebagai penentu batas posisi putaran poros motor servo.
Prinsip kerja motor servo:
Motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa (Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari poros motor servo. Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros motor servo ke posisi sudut 90⁰. Bila pulsa lebih pendek dari 1,5 ms maka akan berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam), sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros motor servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum jam). Lebih jelasnya perhatikan gambar dibawah ini.

Gambar 3.5 Pulse Wide Modulation / PWM
Lebar pulsa kendali telah diberikan, maka poros motor servo akan bergerak atau berputar ke posisi yang telah diperintahkan, dan berhenti pada posisi tersebut dan akan tetap bertahan pada posisi tersebut. Jika ada kekuatan eksternal yang mencoba memutar atau mengubah posisi tersebut, maka motor servo akan mencoba menahan atau melawan dengan besarnya kekuatan torsi yang dimilikinya (rating torsi servo). Namun motor servo tidak akan mempertahankan posisinya untuk selamanya, sinyal lebar pulsa kendali harus diulang setiap 20 ms (mili detik) untuk menginstruksikan agar posisi poros motor servo tetap bertahan pada posisinya.
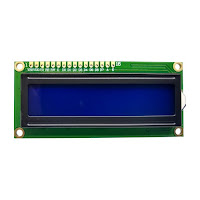
3.3 LCD (16×2)

Gambar 3.3 LCD
LCD atau Liquid Crystal Display adalah suatu jenis media display (tampilan) yang menggunakan kristal cair (liquid crystal) untuk menghasilkan gambar yang terlihat. Teknologi Liquid Crystal Display (LCD) atau Penampil Kristal Cair sudah banyak digunakan pada produk-produk seperti layar Laptop, layar Ponsel, layar Kalkulator, layar Jam Digital, layar Multimeter, Monitor Komputer, Televisi, layar Game portabel, layar Thermometer Digital dan produk-produk elektronik lainnya.
Teknologi Display LCD ini memungkinkan produk-produk elektronik dibuat menjadi jauh lebih tipis jika dibanding dengan teknologi Tabung Sinar Katoda (Cathode Ray Tube atau CRT). Jika dibandingkan dengan teknologi CRT, LCD juga jauh lebih hemat dalam mengkonsumsi daya karena LCD bekerja berdasarkan prinsip pemblokiran cahaya sedangkan CRT berdasarkan prinsip pemancaran cahaya. Namun LCD membutuhkan lampu backlight (cahaya latar belakang) sebagai cahaya pendukung karena LCD sendiri tidak memancarkan cahaya. Beberapa jenis backlight yang umum digunakan untuk LCD diantaranya adalah backlight CCFL (Cold cathode fluorescent lamps) dan backlight LED (Light-emitting diodes).
LCD atau Liquid Crystal Display pada dasarnya terdiri dari dua bagian utama yaitu bagian Backlight (Lampu Latar Belakang) dan bagian Liquid Crystal (Kristal Cair). Seperti yang disebutkan sebelumnya, LCD tidak memancarkan pencahayaan apapun, LCD hanya merefleksikan dan mentransmisikan cahaya yang melewatinya. Oleh karena itu, LCD memerlukan Backlight atau Cahaya latar belakang untuk sumber cahayanya. Cahaya Backlight tersebut pada umumnya adalah berwarna putih. Sedangkan Kristal Cair (Liquid Crystal) sendiri adalah cairan organik yang berada diantara dua lembar kaca yang memiliki permukaan transparan yang konduktif.
Bagian-bagian LCD atau Liquid Crystal Display diantaranya adalah:
Lapisan Terpolarisasi 1 (Polarizing Film 1)
Elektroda Positif (Positive Electrode)
Lapisan Kristal Cair (Liquid Cristal Layer)
Elektroda Negatif (Negative Electrode)
Lapisan Terpolarisasi 2 (Polarizing film 2)
Backlight atau Cermin (Backlight or Mirror)
Dibawah ini adalah gambar struktur dasar sebuah LCD:

Gambar 3.4 Struktur LCD
LCD yang digunakan pada Kalkulator dan Jam Tangan digital pada umumnya menggunakan Cermin untuk memantulkan cahaya alami agar dapat menghasilkan digit yang terlihat di layar. Sedangkan LCD yang lebih modern dan berkekuatan tinggi seperti TV, Laptop dan Ponsel Pintar menggunakan lampu Backlight (Lampu Latar Belakang) untuk menerangi piksel kristal cair. Lampu Backlight tersebut pada umumnya berbentuk persegi panjang atau strip lampu Flourescent atau Light Emitting Diode (LED). Cahaya putih adalah cahaya terdiri dari ratusan cahaya warna yang berbeda. Ratusan warna cahaya tersebut akan terlihat apabila cahaya putih mengalami refleksi atau perubahan arah sinar. Artinya, jika beda sudut refleksi maka berbeda pula warna cahaya yang dihasilkan.
Backlight LCD yang berwarna putih akan memberikan pencahayaan pada Kristal Cair atau Liquid Crystal. Kristal cair tersebut akan menyaring backlight yang diterimanya dan merefleksikannya sesuai dengan sudut yang diinginkan sehingga menghasilkan warna yang dibutuhkan. Sudut Kristal Cair akan berubah apabila diberikan tegangan dengan nilai tertentu. Karena dengan perubahan sudut dan penyaringan cahaya backlight pada kristal cair tersebut, cahaya backlight yang sebelumnya adalah berwarna putih dapat berubah menjadi berbagai warna.
Jika ingin menghasilkan warna putih, maka kristal cair akan dibuka selebar-lebarnya sehingga cahaya backlight yang berwarna putih dapat ditampilkan sepenuhnya. Sebaliknya, apabila ingin menampilkan warna hitam, maka kristal cair harus ditutup serapat-rapatnya sehingga tidak adalah cahaya backlight yang dapat menembus. Dan apabila menginginkan warna lainnya, maka diperlukan pengaturan sudut refleksi kristal cair yang bersangkutan.
Register LCD
LCD 16x2 memiliki dua register seperti register data dan register perintah. RS (register select) atau pilihan daftar terutama digunakan untuk mengubah dari satu register ke register lainnya. Ketika set register adalah '0', maka itu dikenal sebagai register perintah. Demikian pula, ketika set register adalah '1', maka itu dikenal sebagai register data.
Command Register
Fungsi utama dari register perintah adalah untuk menyimpan instruksi perintah yang diberikan ke layar. Di sini pemrosesan perintah dapat terjadi dalam register.
Data Register
Fungsi utama daftar data adalah untuk menyimpan informasi yang akan ditampilkan di layar LCD. Di sini, nilai karakter ASCII adalah informasi yang akan ditampilkan di layar LCD. Setiap kali kita mengirim informasi ke LCD, ia mengirimkan ke daftar data, dan kemudian proses akan mulai di sana. Saat daftar diatur = 1, maka daftar data akan dipilih.
3.4 Buzzer

Gambar 3.5 Buzzer
Buzzer Listrik adalah sebuah komponen elektronika yang dapat mengubah sinyal listrik menjadi getaran suara. Pada umumnya, Buzzer yang merupakan sebuah perangkat audio ini sering digunakan pada rangkaian anti-maling, Alarm pada Jam Tangan, Bel Rumah, peringatan mundur pada Truk dan perangkat peringatan bahaya lainnya. Jenis Buzzer yang sering ditemukan dan digunakan adalah Buzzer yang berjenis Piezoelectric, hal ini dikarenakan Buzzer Piezoelectric memiliki berbagai kelebihan seperti lebih murah, relatif lebih ringan dan lebih mudah dalam menggabungkannya ke Rangkaian Elektronika lainnya. Buzzer yang termasuk dalam keluarga Transduser ini juga sering disebut dengan Beeper.
3.5 LED
Gambar 3.6 LED
Light Emitting Diode atau yang sering disingkat LED merupakan sebuah komponen elektromagnetik yang dapat memancarkan cahaya monokromatik melalui tegangan maju. LED terbuat dari bahan semi konduktor yang merupakan keluarga dioda. LED dapat memancarkan berbagai warna, tergantung dari bahan semikonduktor yang digunakan. LED juga dapat memancarkan cahaya inframerah yang tak tampat, seperti pada remote TV. Cara kerja dari LED hampir sama dengan keluarga dioda yang memiliki dua kutub, yaitu Kutub Positif (P) dan Kutub Negatif (N). LED hanya akan memancarkan cahaya apabila dialiri tegangan maju (bias foward) dari Anoda ke Katoda. LED sendiri terdiri atas sebuah chip semikonduktor yang didopping, sehingga menciptakan junction antara kutub P dan kutub N. Proses dopping dalam semikonduktor adalah proses untuk menambahkan impurity / ketidakmampuan pada semikonduktor yang murni, sehingga dapat emnghasilkan karakteristik kelistrikan yang diinginkan.
3.6 Jumper
Jumper adalah suatu istilah kabel yang ber-diameter kecil yang di dalam dunia elektronika digunakan untuk menghubungkan dua titik atau lebih dan dapat juga untuk menghubungkan 2 komponen elektronika.
Jenis-jenis jumper:
Male-Male

Gambar 3.7 Jumper Male-Male
Kabel jumper jenis ini digunakan untuk koneksi male to male pada kedua ujung kabelnya.
Male-Female

Gambar 3.8 Jumper Male-Female
Kabel jumper jenis ini digunakan untuk koneksi male to female dengan salah satu ujung kabel dikoneksi male dan satu ujungnya lagi dengan koneksi female.
Female-Female

Gambar 3.9 Jumper Female-Female
Kabel jumper jenis ini digunakan untuk koneksi female to female pada kedua ujung kabelnya.
3.7 Arduino UnoArduino adalah kit elektronik atau papan rangkaian elektronik open source yang di dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel. Arduino yang kita gunakan dalam praktikum ini adalah Arduino Uno yang menggunakan chip AVR ATmega 328P. Dalam memprogram Arduino, kita bisa menggunakan komunikasi serial agar Arduino dapat berhubungan dengan komputer ataupun perangkat lain. Adapun spesifikasi dari Arduino Uno ini adalah sebagai berikut :

Gambar 3.10 Arduino

Gambar 3.11 Konfigurasi Pin Arduino
Arduino Uno Pin Diagram
Pinout Catu Daya Arduino Uno
Setidaknya ada 3 cara yang bisa ditempuh untuk memberi daya pada Arduino. yaitu sebagai berikut:
Power Jack
Power jack atau yang biasa juga disebut DC power bisa digunakan untuk memberi daya pada papan sirkuit Arduino. Umumnya power jack ini terhubung pada adaptor untuk menstabilkan tegangan. Papan sirkuit dapat bekerja pada tegangan 5-20 volt, namun dari pihak Arduino sendiri merekomendasikan untuk menggunakan tegangan 7-12 volt. Tegangan yang melebihi 12 volt dikhawatirkan akan membuat regulator sangat panas. Sedangkan pemberian tegangan di bawah 7 volt kemungkinan akan membuat project tak berjalan baik.
Pin VIN
Pin VIN Arduino Uno berfungsi memberikan daya eksternal pada papan sirkuit Arduino menggunakan daya eksternal. Untuk masalah tegangannya, kira-kira sama seperti penjelasan pada power jack.
Kabel USB
Saat menggunakan kabel USB untuk menghubungkan Arduino ke komputer, Arduino akan mendapatkan tegangan 5 volt.

Gambar 3.12 Pinout Catu Daya Arduino Uno
Uno Pinout Arduino
Di papan sirkuit Arduino terdapat dioda pelindung yang menghubungkan antara kutub positif dari power jack ke pin VIN dengan nilai 1 Ampere. Besarnya tegangan yang kamu gunakan pada Arduino sangat mempengaruhi jumlah daya yang akan digunakan untuk rangkaian. Saat kamu menggunakan jack power dan pin VIN untuk menyalakan papan sirkuit, maka kapasitas maksimum yang tersedia bergantung pada regulator 5 dan 3,3 volt di papan Arduino. Pin 5 V dan 3,3, pin ini berguna dalam mengatur besarnya daya yang akan diberikan pada komponen eksternal sesuai dengan spesifikasi pabrik, apakah 5 volt atau 3,3 volt.
Pin GND, di papan Arduino terdapat 5 pin GND yang kesemuanya itu saling berkaitan. Fungsi dari pin ini adalah untuk menutup sirkuit listrik dan menyediakan tingkat referensi logika umum di seluruh sirkuitmu.
Pin Reset, kegunaan dari pin ini adalah untuk mereset program Arduino agar mulai kembali dari awal.
Pin IOREF, pin ini berfungsi untuk memberikan referensi tegangan yang beroperasi pada mikrokontroler.
Pin Analog Arduino Uno

Gambar 3.13 Pin Analog Arduino Uno
Pada dasarnya Arduino memiliki 6 pin analog yang semuanya memanfaatkan ADC (Analog to Digital Converter). Pin ini dapat berfungsi sebagai pin input analog maupun sebagai pin input/output digital. ADC merupakan sirkuit elektronik yang berfungsi mengubah sinyal analog menjadi sinyal digital. Hal ini memungkinkan prosesor yang merupakan perangkat digital bisa mengukur sinyal analog dan menggunakannya melalui operasinya.
Pin A0 sampai A5 memiliki kemampuan membaca tegangan analog. Sementara di Arduino, ADC beresolusi 10-bit yang artinya mewakili tegangan analog dengan 1024 level digital. Singkatnya ADC mengubah tegangan jadi bit yang dapat dipahami oleh mikroprocessor. Contoh sederhana dari ADC adalah VoIP (Voice over IP). Tiap smartphone memiliki mikrofon yang mengonversi gelombang suara menjadi tegangan analog. Yang selanjutnya melewati perangkat ADC yang mengonversi lagi data analog menjadi data digital. Nah, data digital inilah yang nantinya akan dikirim ke penerima melalui internet.
Pin Digital Arduino Uno
Pin 1 - 13 pada Arduino berfungsi sebagai pin input/output digital.
Pin 13 Arduino terhubung ke LED bawaan.
Pin 3, 5, 6, 9, 10, dan 11 memiliki fitur PWM
Perlu kamu ketahui bahwa tiap pin pada Arduino dapat memberikan arus maksimal 40 mA, namun yang disarankan hanya 20 mA. Sementara arus yang bisa disediakan untuk semua pin adalah 200 mA.

Gambar 3.14 Pin Digital Arduino Uno
Digital
Digital bisa dikatakan sebagai cara merepresentasikan tegangan dalam 1 bit, misalnya 1 atau 0. Pin digital di Arduino adalah pin yang memang dirancang untuk dikonfigurasikan sebagai input maupun output. Tergantung kebutuhan pengguna. Pin digital pada Arduino hanya ada dua kondisi, yaitu menyala dan mati. Saat pin dalam kondisi menyala, maka saat itu tegangan nya tinggi (HIGH) yaitu 5 volt, dan saat mati tegangannya rendah (LOW) yaitu 0 volt. Jadi tahu kan mengapa di script Arduino ada HIGH dan LOW! Ketika pin digital diatur sebagai output maka hanya ada dua macam tegangan, yaitu 0 dan 5 volt. Sedangkan saat pin ii diatur sebagai input, maka tegangan yang diberikan bisa bervariasi. Tetapi jika direpresentasikan ke digital tetap hanya ada 1 dan 0. Hanya saja untuk menentukannya diberi 2 ambang batas berikut: < 0, 8 volt dianggap 0 > 2 volt dianggap 1.
PWM
PWM merupakan singkatan dari Pulse Width Modulation, yaitu teknik modulasi yang digunakan untuk menyandikan pesan menjadi sinyal berdenyut. Biasanya PWM digunakan untuk mengatur kecepatan motor DC, Peredupan LED, dan masih banyak lagi. Ada dua komponen utama dari PWM, yaitu : Frekuensi, yaitu berapa lama waktu yang dibutuhkan untuk menyelesaikan satu siklus (periode) dan Siklus Tugas, yaitu berapa lama sinyal tetap tinggi dari total periode. Biasanya siklus tugas berbentuk persentase. Pin Arduino yang mengaktifkan PWM umumnya akan menghasilkan frekuensi konstan 500Hz. Sementara siklus tugas akan terus berubahubah sesuai dengan parameter yang digunakan pengguna.

Gambar 3.15 Pulse Width Modulation
Komunikasi pada Arduino
Pin digital 1 dan 0 merupakan pin serial Arduino yang biasanya digunakan untuk menghubungkan Arduino ke modul bluetooth.
Komunikasi Serial
Komunikasi serial umumnya digunakan untuk saling bertukar data antara papan sirkuit Arduino dan perangkat serial lainnya seperti komputer, display, sensor, dan sebagainya. Setidaknya ada satu port serial pada tiap papan Arduino. Komunikasi serial terjadi pada pin digital (RX) dan 1 (TX) serta melalui USB. Adanya library software serial dan pin digital memungkinkan Arduino bisa mendukung komunikasi serial yang membuat pengguna bisa menghubungkan beberapa perangkat yang mendukung serial dan membiarkan port serial utama tersedia untuk USB. Port serial pada perangkat lunak menggunakan sistem interupsi pin-change dalam berkomunikasi. Sudah tersedia library bawaan untuk melakukan komunikasi serial. Software Serial library memungkinkan untuk berkomunikasi secara serial pada salah satu pin digital pada board Uno. Atmega328 juga mendukung I2C (TWI) dan komunikasi SPI. Perangkat lunak Arduino termasuk perpustakaan Kawat untuk menyederhanakan penggunaan bus I2C, lihat dokumentasi untuk rincian. Untuk komunikasi SPI, menggunakan perpustakaan SPI. Satu-satunya kelemahan dari perangkat lunak serial adalah membutuhkan lebih banyak pemrosesan dan tak dapat mendukung kecepatan tinggi yang sama dengan perangkat keras serial.
3.8 PWM
PWM adalah kepanjangan dari Pulse Width Modulation atau dalam bahasa Indonesia dapat diterjemahkan menjadi Modulasi Lebar Pulsa. Jadi pada dasarnya, PWM adalah suatu teknik modulasi yang mengubah lebar pulsa (pulse width) dengan nilai frekuensi dan amplitudo yang tetap. PWM dapat dianggap sebagai kebalikan dari ADC (Analog to Digital Converter) yang mengkonversi sinyal Analog ke Digital, PWM atau Pulse Width Modulation ini digunakan menghasilkan sinyal analog dari perangkat Digital (contohnya dari Mikrokontroller).
Siklus Kerja PWM (PWM Duty Cycle)
Sinyal PWM akan tetap ON untuk waktu tertentu dan kemudian terhenti atau OFF selama sisa periodenya. Yang membuat PWM ini istimewa dan lebih bermanfaat adalah kita dapat menetapkan berapa lama kondisi ON harus bertahan dengan cara mengendalikan siklus kerja atau Duty Cycle PWM.
Persentase waktu di mana sinyal PWM tetap pada kondisi TINGGI (ON Time) disebut dengan “siklus kerja” atau “Duty Cycle”. Kondisi yang sinyalnya selalu dalam kondisi ON disebut sebagai 100% Duty Cycle (Siklus Kerja 100%), sedangkan kondisi yang sinyalnya selalu dalam kondisi OFF (mati) disebut dengan 0% Duty Cycle (Siklus Kerja 0%).
Rumus untuk menghitung siklus kerja atau duty cycle dapat ditunjukkan seperti persamaan di bawah ini.
Duty Cycle = tON / (tON + tOFF)
Atau
Duty Cycle = tON / ttotal
Dimana:
tON = Waktu ON atau Waktu dimana tegangan keluaran berada pada posisi tinggi (high atau 1)
tOFF = Waktu OFF atau Waktu dimana tegangan keluaran berada pada posisi rendah (low atau 0)
ttotal = Waktu satu siklus atau penjumlahan antara tON dengan tOFF atau disebut juga dengan “periode satu gelombang”
Siklus Kerja = Waktu ON / (Waktu ON + Waktu OFF)
Gambar berikut ini mewakili sinyal PWM dengan siklus kerja 60%. Seperti yang kita lihat, dengan mempertimbangkan seluruh periode waktu (ON time + OFF time), sinyal PWM hanya ON untuk 60% dari suatu periode waktu.
Pada board Arduino Uno, pin yang bisa dimanfaatkan untuk PWM adalah pin yang diberi tanda tilde (~), yaitu pin 3, 5, 6, 9, 10, dan pin 11. Pin-pin tersebut merupakan pin yang bisa difungsikan untuk input analog atau output analog. Oleh sebab itu, jika akan menggunakan PWM pada pin ini, bisa dilakukan dengan perintah analogWrite();\
PWM pada arduino bekerja pada frekuensi 500Hz, artinya 500 siklus/ketukan dalam satu detik. Untuk setiap siklus, kita bisa memberi nilai dari 0 hingga 255. Ketika kita memberikan angka 0, berarti pada pin tersebut tidak akan pernah bernilai 5 volt (pin selalu bernilai 0 volt). Sedangkan jika kita memberikan nilai 255, maka sepanjang siklus akan bernilai 5 volt (tidak pernah 0 volt). Jika kita memberikan nilai 127 (kita anggap setengah dari 0 hingga 255, atau 50% dari 255), maka setengah siklus akan bernilai 5 volt, dan setengah siklus lagi akan bernilai 0 volt. Sedangkan jika jika memberikan 25% dari 255 (1/4 * 255 atau 64), maka 1/4 siklus akan bernilai 5 volt, dan 3/4 sisanya akan bernilai 0 volt, dan ini akan terjadi 500 kali dalam 1 detik.

Gambar 3.16 Siklus Sinyal PWM pada Arduino
3.9 ADC
ADC atau Analog to Digital Converter merupakan salah satu perangkat elektronika yang digunakan sebagai penghubung dalam pemrosesan sinyal analog oleh sistem digital. Fungsi utama dari fitur ini adalah mengubah sinyal masukan yang masih dalam bentuk sinyal analog menjadi sinyal digital dengan bentuk kode-kode digital. Ada 2 faktor yang perlu diperhatikan pada proses kerja ADC yaitu kecepatan sampling dan resolusi.
Kecepatan sampling menyatakan seberapa sering perangkat mampu mengkonversi sinyal analog ke dalam bentuk sinyal digital dalam selang waktu yang tertentu. Biasa dinyatakan dalam sample per second (SPS). Sementara Resolusi menyatakan tingkat ketelitian yang dimilliki. Pada Arduino, resolusi yang dimiliki adalah 10 bit atau rentang nilai digital antara 0 - 1023. Dan pada Arduino tegangan referensi yang digunakan adalah 5 volt, hal ini berarti ADC pada Arduino mampu menangani sinyal analog dengan tegangan 0 - 5 volt.
Pada Arduino, menggunakan pin analog input yang diawali dengan kode A(A0- A5) pada Arduino Uno. Fungsi untuk mengambil data sinyal input analog menggunakan analogRead(pin);
3.10 UART
UART (Universal Asynchronous Receiver-Transmitter) adalah bagian perangkat keras komputer yang menerjemahkan antara bit-bit paralel data dan bit-bit serial. UART biasanya berupa sirkuit terintegrasi yang digunakan untuk komunikasi serial pada komputer atau port serial perangkat periperal.
Cara Kerja Komunikasi UART

Gambar 3.17 Komunikasi UART
Data dikirimkan secara paralel dari data bus ke UART1. Pada UART1 ditambahkan start bit, parity bit, dan stop bit kemudian dimuat dalam satu paket data. Paket data ditransmisikan secara serial dari Tx UART1 ke Rx UART2. UART2 mengkonversikan data dan menghapus bit tambahan, kemudia di transfer secara parallel ke data bus penerima.

Gambar 3.18 Sensor Infrared

Gambar 3.19 Grafik Respon Sensor Infrared
Inframerah (Infrared) adalah radiasi elektromagnetik dari panjang gelombang lebih panjang dari cahaya tampak, tetapi lebih pendek dari radiasi gelombang radio. Namanya berarti “bawah merah” (dari bahasa Latin infra, “bawah”), merah merupakan warna dari cahaya tampak dengan gelombang terpanjang.
Radiasi Infrared (Inframerah) memiliki jangkauan tiga “order” dan memiliki panjang gelombang antara 700 nm dan 1 mm. Infrared (Inframerah) ditemukan secara tidak sengaja oleh Sir William Herschell, astronom kerajaan Inggris ketika ia sedang mengadakan penelitian mencari bahan penyaring optis yang akan digunakan untuk mengurangi kecerahan gambar matahari pada teleskop tata surya.
Karakteristik infrared (Inframerah)
Infrared (Inframerah) ini tidak dapat dilihat oleh manusia;
Infrared (Inframerah) tidak dapat menembus materi yang tidak tembus pandang;
Infrared (Inframerah) dapat ditimbulkan oleh komponen yang menghasilkan panas;
Sedangkan jika dibagi berdasarkan panjang gelombangnya maka Infrared (Inframerah) ini bisa diklasifikasikan sebagai berikut :
Infrared (Inframerah) jarak dekat dengan panjang gelombang 0.75 – 1.5 µm;
Infrared (Inframerah) jarak menengah dengan panjang gelombang 1.50 – 10 µm;
Infrared (Inframerah) jarak jauh dengan panjang gelombang 10 – 100 µm
Spesifikasi:
Tegangan operasi 5VDC
Pin I/O sesuai dengan 5V dan 3.3V
Jangkauan: Hingga 20cm
Rentang Penginderaan yang dapat disesuaikan
Sensor Cahaya Sekitar Bawaan
Arus pasokan 20mA
Lubang pemasangan
Ukuran: 50 x 20 x 10 mm (P x L x T)
Ukuran lubang: φ2.5mm

Gambar 3.20 Bagian-Bagian Sensor IR FC-51
Prinsip kerja sensor IR
Modul sensor infrared FC-51 merupakan suatu rangkaian yang digunakan untuk mendeteksi sinar infra merah pada area kerjanya. Dalam rangkaian sensor infrared FC-51 ini terdapat dua buah komponen infrared yaitu pemancar infrared (IR Transmitter) dan penerima infrared (IR Receiver). Pemancar infrared merupakan sebuah photodioda yang dapat memancarkan sinar infra merah, sendangkan penerima infrared merupakan sebuah dioda khusus yang berfungsi sebagai penerima sinar infra merah. Bagian-bagian sensor infrared FC-51 terlihat pada gambar di bawah.
Pada saat sumber tengangan dihubungkan ke VCC dan GND, maka lampu indikator modul akan hidup (ON). Cara kerja dari sensor infrared FC-51 ini adalah dengan memancarkan sinar infra merah melalui dioda pemancar infra merah. Jika tidak ada benda yang ada di wilayah pancaran infra merah, maka tidak ada media yang dapat memantulkan sinar infra merah tersebut. Penerima infra merah tidak akan mendeteksi apapun. Pada keadaan ini, LED indikator sinyal akan mati (OFF) dan sinyal keluaran akan berlogika HIGH (5V).
Jika ada benda yang ada di wilayah pancaran infra merah dioda tersebut, maka sinar infra merah tersebut akan dipantulkan kembali. Pantulan sinar infra merah ini akan dideteksi oleh dioda photo dan akan diproses oleh IC LM393. Pada keadaan sepeti ini, LED indikator sinyal akan hidup (ON) dan sinyal keluaran akan berlogika LOW (0V).
Jarak benda yang dideteksi bisa disesuaikan dengan cara memutar potensio (pengatur jarak) agar dapat mendeteksi benda dengan jarak antara 2 cm hingga 15 cm. Sensor infrared FC-51 ini bekerja dengan tegangan 5 volt DC.
3.12 Sensor PIR (HC-SR501)

Gambar 3.21 Sensor PIR
Sensor PIR merupakan sensor yang dapat mendeteksi pergerakan, dalam hal ini sensor PIR banyak digunakan untuk mengetahui apakah ada pergerakan manusia dalam daerah yang mampu dijangkau oleh sensor PIR. Sensor ini memiliki ukuran yang kecil, murah, hanya membutuhkan daya yang kecil, dan mudah untuk digunakan. Oleh sebab itu, sensor ini banyak digunakan pada skala rumah maupun bisnis. Sensor PIR ini sendiri merupakan kependekan dari “Passive InfraRed” sensor.
Sensor PIR biasanya digunakan dalam perancangan detektor gerakan berbasis PIR. Karena semua benda memancarkan energi radiasi, sebuah gerakan akan terdeteksi ketika sumber infra merah dengan suhu tertentu (misal: manusia) melewati sumber infra merah yang lain dengan suhu yang berbeda (misal: dinding), maka sensor akan membandingkan pancaran infra merah yang diterima setiap satuan waktu, sehingga jika ada pergerakan maka akan terjadi perubahan pembacaan pada sensor.
Sensor PIR didesain dan dirancang hanya mendeteksi pancaran infra merah dengan panjang gelombang 8-14 mikrometer. Diluar panjang gelombang tersebut sensor tidak akan mendeteksinya. Untuk manusia sendiri memiliki suhu badan yang dapat menghasilkan pancaran infra merah dengan panjang gelombang antara 9-10 mikrometer (nilai standar 9,4 mikrometer), panjang gelombang tersebut dapat terdeteksi oleh sensor PIR. (Secara umum sensor PIR memang dirancang untuk mendeteksi manusia). Pada umumnya sensor PIR memiliki jangkauan pembacaan efektif hingga 5 meter, dan sensor ini sangat efektif digunakan sebagai human detector.
Prinsip Kerja Sensor PIR:
Cara kerja pembacaan sensor PIR adalah dengan cara pancaran infra merah masuk melalui lensa Fresnel dan mengenai sensor pyroelektrik, karena sinar infra merah mengandung energi panas maka sensor pyroelektrik akan menghasilkan arus listrik. Arus listrik inilah yang akan menimbulkan tegangan dan dibaca secara analog oleh sensor. Kemudian sinyal ini akan dikuatkan oleh penguat dan dibandingkan oleh komparator dengan tegangan referensi tertentu (keluaran berupa sinyal 1-bit). Jadi sensor PIR hanya akan mengeluarkan logika 0 dan 1, 0 saat sensor tidak mendeteksi adanya pancaran infra merah dan 1 saat sensor mendeteksi infra merah.

Gambar 3.22 Diagram Blok Sensor PIR
Untuk jarak jangkau dari sensor PIR disetting sesuai kebutuhan tergantung karakteristik sensor PIR, proses pengindraan sensor PIR dapat dilihat pada Gambar

Gambar 3.23 Proses Pengindraan Sensor PIR
Mode operasi sensor:
Pada sensor PIR terdapat dua mode operasi pada sensor ini seperti Repeatable(H) dan Non-Repeatable(L) dan mode. Mode Berulang adalah mode default. Keluaran dari sensor dapat diatur dengan mempersingkat dua pin di sebelah kiri modul seperti yang ditunjukkan di bawah ini. Anda juga dapat melihat dua potensiometer warna oranye yang dapat digunakan untuk mengatur sensitivitas dan waktu yang akan dijelaskan lebih lanjut di bawah ini:

Gambar 3.24 Mode Operasi Sensor PIR
Mode Dapat Diulang (H)
Dalam mode Repeatable(H) pin keluaran Dout akan menjadi tinggi (3.3V) ketika seseorang terdeteksi dalam jangkauan dan menjadi rendah setelah waktu tertentu (waktu diatur oleh potensiometer "Off time control"). Dalam mode ini pin keluaran akan menjadi tinggi terlepas dari apakah orang tersebut masih ada di dalam jangkauan atau telah meninggalkan area tersebut. Sensitivitas dapat diatur menggunakan potensiometer "kontrol sensitivitas"
Mode Tidak Dapat Diulang (L)
Dalam mode "I", pin keluaran Dout akan menjadi tinggi (3.3V) ketika seseorang terdeteksi dalam jangkauan dan akan tetap tinggi selama dia tetap berada dalam batas jangkauan Sensor. Setelah orang tersebut meninggalkan area tersebut, pin akan menjadi rendah setelah waktu tertentu yang dapat diatur menggunakan potensiometer. Sensitivitas dapat diatur menggunakan potensiometer "kontrol sensitivitas"
Penggunaan / Aplikasi Sensor PIR
Sensor PIR sangat cocok digunakan pada projek-projek yang membutuhkan deteksi kapan seseorang memasuki atau meninggalkan are tertentu. Hal ini karena sensor PIR membutuhkan daya yang rendah, murah, memiliki jangkauan yang luas, dan mudah digunakan dengan berbagai sistem kontrol.
Catatan: Sensor PIR tidak dapat digunakan untuk mengetahui berapa orang yang berada pada jangkauan sensor atau seberapa dekat objek dengan sensor dan sensor PIR juga dapat dipengaruhi oleh binatang peliharaan.
Informasi Dasar
Setiap sensor PIR memiliki spesifikasi dan kriteria yang berbeda-beda namun hampir kebanyakan dari sensor PIR memiliki spesifikasi yang mirip (Direkomendasikan untuk mengacu pada datasheet). Berikut spesifikasi sensor PIR pada umumnya.
Bentuk : Persegi
Output : Pulsa digital HIGH (3V) ketika mendeteksi pergerakan dan LOW ketika tidak ada pergerakan.
Rentang Sensitivitas : Sampai dengan 6 meter sebagaimana gambar berikut

Gambar 3.25 Jangkauan Sensor PIR
Power Supply : 5V-12V (direkomendasikan 5VDC).
Spesifikasi:
Jarak pendeteksian : +/- 6 m.
Menggunakan 1 pin output.
Dua jenis output :
Continuous high/low.
High-low pulse.
Terdapat jumper konfigurasi pemilihan output.
Menggunakan header 3x1 dengan pitch 2.54 mm.
Tegangan kerja : 3.3 VDC - 5 VDC.
Dimensi : 32.2 mm x 24.3 mm x 25.4 mm.
Kompatibel dengan berbagai macam mikrokontroler.
Deskripsi Pin

Gambar 3.26 Diagram pin module Sensor PIR
Gambar 6 Diagram pin modul sensor PIR
Pin 1 – GND : Kita harus menghubungkan pin ini ke Ground.
Pin 2 – Output : Pin ini menghasilkan keluaran (3.5V) ketika gerak terdeteksi
Pin 3 – VCC : Pin ini menyediakan catu daya (+5V) bagi elemen PIR dan rangkaian internal modul.
Bagian-Bagian Sensor PIR
Gambar berikut menunjukkan bagian-bagian dari sensor PIR yang perlu untuk diketahui

Gambar 3.27 Bagian Sensor PIR
Pengatur Waktu Jeda : Digunakan untuk mengatur lama pulsa high setelah terdeteksi terjadi gerakan dan gerakan telah berahir. *
Pengatur Sensitivitas : Pengatur tingkat sensitivitas sensor PIR *
Regulator 3VDC : Penstabil tegangan menjadi 3V DC
Dioda Pengaman : Mengamankan sensor jika terjadi salah pengkabelan VCC dengan GND
DC Power : Input tegangan dengan range (3 – 12) VDC (direkekomendasikan menggunakan input 5VDC).
Output Digital : Output digital sensor
Ground : Hubungkan dengan ground (GND)
BISS0001 : IC Sensor PIR
Pengatur Jumper : Untuk mengatur output dari pin digital.
3.13 Sensor RFID (RC522)

Gambar 3.28 Sensor RFID
RFID adalah singkatan dari Radio Frequency Identification, karena namanya mendefinisikan pengoperasian perangkat didasarkan pada sinyal frekuensi Radio. Sistem RFID terdiri dari Pembaca RFID dan tag yang biasanya digunakan dalam identifikasi dan pelacakan objek. Sebelum membahas lebih lanjut tentang RFID, mari kita lihat keunikan teknologi ini dan aplikasi umumnya. Saat ini dalam kebanyakan kasus barcode digunakan untuk mengidentifikasi suatu barang di gudang atau supermarket menggunakan pemindai barcode, sistem yang ada ini dapat ditingkatkan dengan teknologi RFID. Mirip dengan barcode, RFID juga dapat memberikan nomor identifikasi unik untuk semua produk tetapi keuntungan tambahannya tidak seperti garis pandang sistem barcode, sistem ini dapat mendeteksi tag RFID dalam jangkauan kedekatannya. Artinya Anda tidak perlu manusia untuk mencari barcode dan mengarahkan pemindai barcode di atasnya. Dengan fitur ini sebagian besar sistem dapat diotomatisasi dan intervensi manusia dapat diminimalkan karena tag dapat dipindai dan ditagih secara otomatis ketika mencapai pembaca RFID. Kunci pintu RFID dan sistem kehadiran RFID sangat populer sekarang dan banyak hotel menyediakan tag RFID kepada pelanggan mereka untuk mengunci dan membuka kunci pintu.
Konstruksi Sistem RFID
Sistem RFID apa pun akan terdiri dari pembaca RFID dan tag RFID. Tag akan sering kecil dan portabel dengan sedikit atau tanpa elektronik di dalamnya. Kami akan mempelajari lebih lanjut tentang tag nanti di artikel ini, sistem RFID sederhana dapat direpresentasikan menggunakan diagram blok di bawah ini.

Gambar 3.29 Diagram Blok Sistem RFID
Pembaca RFID
Ini adalah perangkat yang terdiri dari antena, transceiver dan decoder.
Transceiver: Ini dapat digunakan baik sebagai pemancar atau penerima. Ini terdiri dari osilator untuk menghasilkan sinyal kontinu yang dimodulasi ke frekuensi yang diperlukan dan kemudian ditransmisikan ke udara melalui antena.
Antena: Ini adalah perangkat yang mengubah sinyal listrik menjadi sinyal elektromagnetik yang efisien dalam menyebarkan sinyal di udara.
Decoder: Ketika sinyal RF terdeteksi di antena dari tag, decoder membantu dalam mengambil data.
RFID Tag
Ini terdiri dari 2 komponen (dalam kasus tag pasif). Mereka adalah Microchip dan antena. Anda dapat mengetahui lebih banyak tentang Tag RIFD di sini.
Microchip: Ini adalah perangkat semikonduktor yang terdiri dari sirkuit yang terukir di dalamnya dengan beberapa KB penyimpanan memori, yang mampu menyimpan data dan mengirimkannya kapan pun diperlukan.
Antena: Ini digunakan untuk mengirimkan data yang ada di chip ke udara sehingga dapat dideteksi oleh pembaca.
Dalam kasus tag aktif itu terdiri dari Microchip, baterai dan antena
Baterai: Dalam perangkat aktif untuk menyalakan baterai microchip digunakan secara eksternal.

Gambar 3.30 RFID Tag
Cara Kerja:
RFID menggunakan sistem identifikasi dengan gelombang radio, karena itu minimal dibutuhkan dua buah perangkat agar alat ini dapat berfungsi, adapun perangkat yang dibutuhkan disebut TAG dan READER.
RFID TAG
Alat yang melekat pada objek yang akan diidentifikasi oleh RFID Reader. Terdapat 2 jenis RFID TAG yaitu perangkat pasif dan aktif. TAG pasif tanpa menggunakan baterai sedangkan TAG aktif menggunakan baterai untuk dapat berfungsi. alat ini dapat berupa perangkat read-only yang berarti hanya dapat dibaca saja ataupun perangkat read-write yang berarti dapat dibaca dan ditulis ulang.
Alat ini hanya berisi sebuah TAG yang unik yang berbeda satu dengan yang lainnya. Jadi informasi mengenai objek yang terhubung ke tag ini hanya terdapat pada sistem atau database yang terhubung pada RFID Reader.
RFID Reader
RFID Reader merupakan alat pembaca dari RFID TAG. Ada dua macam RIFD Reader yaitu Reader Pasif dan Reader Aktif.
Reader Pasif memiliki sistem pambaca pasif yang hanya dapat menerima sinyal radio dari TAG Aktif (yang dioperasikan dengan baterai). Jangkauan penerima alat ini dapat mencapai sampai dengan jarak 600 meter. Hal ini memungkinkan untuk dijadikan sebagai sistem perlindungan dan pengawasan aset.
Reader Aktif memiliki sistem pembaca aktif yang dapat memancarkan sinyal interogator ke TAG dan menerima balasan autentikasi dari TAG. Sinyal interogator ini juga menginduksi TAG dan akhirnya menjadi sinyal DC sehingga dapat menjadi sumber daya TAG Pasif.
Spesifikasi:
Operating Voltage: 2.5V~3.3V.
Operating/Standby current: 13~26mA/10~13mA.
Operating Frequency: 13.56MHz.
Supports ISO/IEC 14443A higher transfer speed communication up to 848 KBd.
SPI bus speed up to 10Mbit/s.
I2C-bus interface up to 400 kBd in Fast mode, up to 3400 kBd in High-speed mode.
RS232 Serial UART up to 1228.8 kBd, with voltage levels dependant on pin voltage supply.
Compatible with MIFARE and ISO 14443A cards.
Typical operating distance in Read/Write mode up to 50 mm depending on the antenna size and tuning.
3.14 Breadboard

Gambar 3.31 Breadboard
Definisi breadboard Arduino adalah sejenis papan roti yang biasanya digunakan untuk membuat prototype rangkaian elektronik. Beberapa orang kadang menyebutnya project board atau bahkan protoboard (prototype board). Pada dasarnya breadboard adalah board yang digunakan untuk membuat rangkaian elektronik tanpa harus merepotkan pengguna untuk menyolder. Biasanya papan breadboard ini digunakan untuk membuat rangkaian elektronik sementara untuk tujuan uji coba atau prototype.
Kegunaan breadboard yaitu sebagai media penghantar (konduktor listrik) sekaligus tempat kabel jumper dilekatkan. Sehingga arus dari satu komponen bisa terdistribusi dengan baik sesuai keinginan ke komponen lain tanpa harus merepotkan pengguna untuk melakukan penyolderan atau melakukan bongkar pasang. Salah satu kelebihan tersendiri dari penggunaan breadboard adalah komponen-komponen yang telah dirakit tak akan rusak dan mudah untuk dibongkar pasang. Ini karena papan breadboard merupakan papan tanpa solder (solderless).
Sekilas, breadboard kelihatan seperti papan plastik yang memiliki banyak lubang-lubang di atasnya dengan posisi membentuk pola tertentu. Bila diperhatikan lebih dekat maka kamu akan melihat beberapa deretan huruf, angka, dan perpaduan keduanya pada bagian atas breadboard. Tepatnya di dekat lubang koneksi.
Fungsi deretan huruf, angka dan perpaduannya tersebut adalah sebagai titik kordinat untuk memudahkanmu dalam memosisikan kabel jumper di breadboard.
Cara Kerja Breadboard:
Secara singkat, papan breadboard bisa dideskripsikan sebagai papan yang memiliki lubang koneksi berdasarkan pola tertentu. Untuk menghubungkan antara satu lubang dengan lubang yang lain, maka di bagian bawah lubang tersebut terdapat logam konduktor listrik yang diposisikan secara khusus. Ini berguna untuk memudahkan pengguna dalam membuat rangkaian. Logam konduktor yang ada di dalam breadboard umumnya seperti ini:

Gambar 3.32 Logam di dalam Breadboard
Berdasarkan gambar di atas, fungsi dari masing-masing jalur koneksi pada breadboard dengan keterangan warnanya yaitu sebagai berikut:
Jalur warna merah, digunakan untuk menempatkan pin 5V atau kutub positif dari Arduino untuk dihubungkan ke kutub positif komponen lain.
Jalur warna biru, digunakan untuk menempatkan pin GND atau kutub negatif dari Arduino untuk dihubungkan ke kutub negatif komponen lain.
Jalur warna hijau, digunakan untuk menempatkan pin digital dari Arduino untuk dihubungkan ke komponen lain.

Gambar 3.33 Jalur Koneksi Breadboard
Selain itu, di bagian tengah papan breadboard terdapat ruang kosong yang masing-masing pinggirannya terdapat ujung jalur vertikal. Fungsi dari ruang kosong ini adalah untuk menancapkan langsung ic component.
Jenis-jenis Breadboard:
Beberapa ukuran breadboard yang tersedia di pasaran antara lain:
Mini Breadboard

Gambar 3.34 Mini Breadboard
Jenis yang paling kecil diantara semua breadboard dan memiliki sekitar 170 titik koneksi.
mini breadboard
Medium Breadboard

Gambar 3.35 Medium Breadboard
Jenis breadboard ukuran sedang yang kadang juga disebut half breadboard karena memiliki ukuran dan jumlah titik koneksinya setengah dari jumlah titik koneksi breadboard ukuran besar. Yaitu 400 titik koneksi.
Large Breadboard

Gambar 3.39 Large Breadboard
Jenis yang ukurannya paling besar diantara semua jenis breadboard dan memiliki sekitar 830 titik koneksi.
Modul LED Lampu Lalu Lintas memiliki LED Merah, Kuning dan Hijau besar yang diatur dalam pola lampu lalu lintas standar dengan resistor pembatas arus bawaan.
Fitur utama:
LED Merah, Kuning, dan Hijau 8mm Besar
LED aktif TINGGI
Resistor pembatas arus bawaan
Kompatibel dengan 3.3 dan 5V
Modul ini mencakup LED Merah, Kuning, dan Hijau 8mm besar yang disusun seperti lampu lalu lintas biasa yang berguna untuk bereksperimen dengan sinyal lalu lintas, menggunakannya pada model kereta api atau sebagai beberapa jenis indikator status baik/hati-hati/buruk untuk suatu proyek.
Modul memiliki resistor pembatas arus bawaan, sehingga dapat dihubungkan langsung ke pin MCU. Anda bahkan dapat mencolokkannya langsung ke header wanita dari sebagian besar papan Arduino di mana Anda memiliki 3 pin digital di sebelah ground, seperti menggunakan pin Uno 11, 12, 13 & Gnd. LED menyala ketika logika HIGH diterapkan ke pin.
Koneksi Modul
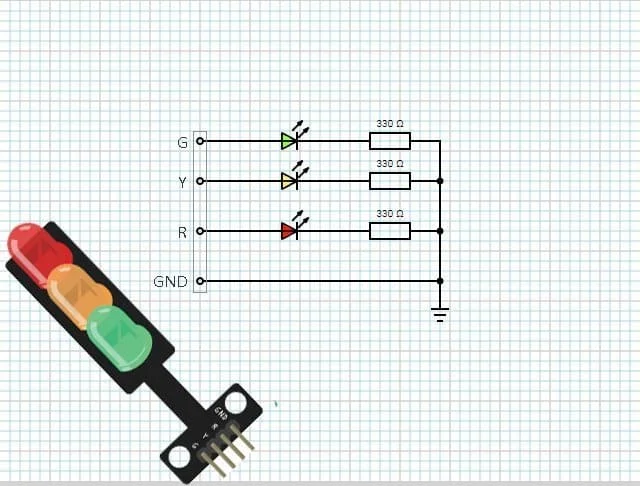
G = LED hijau, TINGGI aktif
Y = LED kuning, TINGGI aktif
R = LED merah, TINGGI aktif
GND = Ground
// MASTER ARDUINO #include <SPI.h> #include <MFRC522.h> #define SS_PIN 10 #define RST_PIN 9 int pir = 7; int statuspir = 0; int ir = 6; int statusir = 0; MFRC522 mfrc522(SS_PIN, RST_PIN); // Create MFRC522 instance. void setup() { Serial.begin(9600); // Initiate a serial communication pinMode(pir, INPUT); pinMode(ir, INPUT); SPI.begin(); // Initiate SPI bus mfrc522.PCD_Init(); // Initiate MFRC522 } void loop() { statuspir = digitalRead(pir); statusir = digitalRead(ir); if (statuspir == HIGH && statusir == HIGH) { Serial.print("1"); delay(5000); } else if (statuspir == HIGH && statusir== LOW) { Serial.print("2"); delay(5000); } else if (statuspir == LOW && statusir== HIGH) { Serial.print("5"); delay(1000); } else if (statuspir == LOW && statusir== LOW) { Serial.print("6"); delay(3000); } // Look for new cards if ( ! mfrc522.PICC_IsNewCardPresent()) { return; } // Select one of the cards if ( ! mfrc522.PICC_ReadCardSerial()) { return; } //Show UID on serial monitor String content= ""; byte letter; for (byte i = 0; i < mfrc522.uid.size; i++) { //Serial.print(mfrc522.uid.uidByte[i] < 0x10 ? " 0" : " "); //Serial.print(mfrc522.uid.uidByte[i], HEX); content.concat(String(mfrc522.uid.uidByte[i] < 0x10 ? " 0" : " ")); content.concat(String(mfrc522.uid.uidByte[i], HEX)); } //Serial.println(); //Serial.print("Message : ") content.toUpperCase(); // RFID set if (content.substring(1) == "22 2A 16 2E") //change here the UID of the card/cards that you want to give access { Serial.print("3"); delay(10000); } else { Serial.print("4"); delay(2000); } }B. Program SLAVE
// SLAVE ARDUINO #include <LiquidCrystal.h> #include<Servo.h> const int rs = 12, en = 11, d4 = 10, d5 = 9, d6 = 8, d7 = 7; LiquidCrystal lcd(rs, en, d4, d5, d6, d7); Servo myservo; // create servo object to control a servo int pos = 0; #define buzzer 5 #define ledm 4 #define ledk 3 #define ledh 2 void setup() { Serial.begin(9600); // Initiate a serial communication lcd.begin(16, 2); // set up the LCD's number of columns and rows: pinMode(ledm, OUTPUT); pinMode(ledk, OUTPUT); pinMode(ledh, OUTPUT); pinMode(buzzer, OUTPUT); myservo.attach(6); myservo.write(0); } void loop() { digitalWrite(ledh, HIGH); lcd.setCursor(0,0); lcd.print("SECURITY SISTEM FOR"); lcd.setCursor(0,1); lcd.print("SAFE DEPOSIT BOX"); if (Serial.available() > 0) { int data = Serial.read(); if (data == '1') { digitalWrite(ledh,LOW); lcd.clear(); lcd.setCursor(0,0); lcd.print("PIR STATUS:"); lcd.setCursor(0,1); lcd.print("MOVEMENT DETECT"); for(int i=0; i<5; i++) { digitalWrite(ledk,HIGH); digitalWrite(buzzer,HIGH); delay(500); digitalWrite(ledk,LOW); digitalWrite(buzzer,LOW); delay(500); } lcd.clear(); } else if (data == '2') { digitalWrite(ledh,LOW); lcd.clear(); lcd.setCursor(0,0); lcd.print("IR STATUS: "); lcd.setCursor(0,1); lcd.print("ROBBER DETECT"); digitalWrite(ledm, HIGH); digitalWrite(buzzer, HIGH); delay(5000); digitalWrite(ledm, LOW); digitalWrite(buzzer, LOW); lcd.clear(); } else if (data == '3') { digitalWrite(ledh,LOW); myservo.write(180); // tell servo to go to position in variable 'pos' lcd.clear(); lcd.setCursor(0,0); lcd.print("RFID STATUS:"); lcd.setCursor(0,1); lcd.print("ACCESS GRANTED"); for(int i=0; i<2; i++) { digitalWrite(buzzer,HIGH); delay(100); digitalWrite(buzzer,LOW); delay(100); } delay(4600); lcd.clear(); lcd.setCursor(0,0); lcd.print("UID: 22 2A 16 2E"); lcd.setCursor(0,1); lcd.print("SECURITY OFFICER"); delay(5000); myservo.write(0); lcd.clear(); } else if (data == '4') { digitalWrite(ledh,LOW); lcd.clear(); lcd.setCursor(0,0); lcd.print("RFID STATUS:"); lcd.setCursor(0,1); lcd.print("ACCESS DENIED"); digitalWrite(ledm, HIGH); digitalWrite(buzzer, HIGH); delay(2000); digitalWrite(ledm, LOW); digitalWrite(buzzer, LOW); lcd.clear(); } else if (data == '5') { digitalWrite(ledh, HIGH); delay(500); digitalWrite(ledh, LOW); delay(500); } else { digitalWrite(ledh,LOW); lcd.clear(); lcd.setCursor(0,0); lcd.print("IR STATUS: "); lcd.setCursor(0,1); lcd.print("PEOPLE DETECT"); for(int i=0; i<=2; i++) { digitalWrite(ledh, HIGH); delay(500); digitalWrite(ledh, LOW); delay(500); } lcd.clear(); } } }
Flowchart Master
 |
Flowchart Slave


Gambar 6.1 Rangkaian Simulasi

Gambar 7.1 Rangkaian di Master

Gambar 7.2 Rangkaian di Slave
- Video Percobaan Project
- Video Simulasi Proteus
Semua sensor mati maka led hijau hidupdan lcd tulisan judul “SECURITY SYSTEM FOR SAFE DEPOSIT BOX”
Jika petugas masuk ruangan brankas maka petugas menggunakan rfid card sehingga pintu terbuka, led hijau, buzzer hidup-mati selama 1 detik, dan pada lcd menampilkan tulisan “rfid status: access granted” kemudian ketika ir sensor mendeteksi petugas, led hijau hidup mati selama petugas terdeteksi dan lcd menampilkan tulisan “ir status: officer”
Jika salah kartu maka buzzer dan led merah hidup selama 5 detik kemudian lcd rfid status: access denied
Ketika sensor pir aktif mendeteksi pergerakan objek di atas atap, output led kuning dan buzzer hidup mati selama 5 detik, dan lcd menampilkan tulisan “pir status: movement detect”
Ketika maling memasuki ruangan setelah menjebol atap sensor ir aktif dan output led merah dan buzzer hidup selama maling terdeteksi, dan lcd menampilkan “ir status: robber detect”.
Ketika maling memasuki ruagan brankas dengan cara apapun, akan terdeteksi dengan sensor ir, output led merah dan buzzer hidup selama maling terdeteksi, dan lcd menampilkan “ir status: robber detect”.
- Download File HTML klik disini
- Download Rangkaian Proteus & Programnya klik disini
- Download Program Project klik disini
- Download Video Simulasi Proteus klik disini
- Download Video Simulasi Project klik disini
- Download Datasheet Arduino Uno klik disini
- Download Datasheet LED klik disini
- Download Datasheet BreadBoard klik disini
- Download Datasheet Potensiometer klik disini
- Download Datasheet Buzzer klik disini
- Download Datasheet Motor Servo klik disini
- Download Datasheet Sensor RFID klik disini
- Download Datasheet Sensor Infrared klik disini
- Download Datasheet Sensor PIR klik disini
- Download Datasheet LCD klik disini
- Download File Library Sensor PIR klik disini
- Download File Library Sensor Infrared klik Disini
- Download File Library Arduino UNO klik disini
No comments:
Post a Comment