BEDAH KASUS ALGORITMA GENETIKA
Referensi: Jose F. Amaral, Ricardo Tanscheit, Marco A. C. Pacheco, "Tuning PID Controller through Genetic Algorithms", Department of Electronics and Telecommunications Engineering Rio de Janeiro State University. Available: https://citeseerx.ist.psu.edu/document?repid=rep1&type=pdf&doi=f07683ad64892ab34acca14e3066b47681bdf772
.
PID TUNING THROUGH GENETIC ALGORITHMS
1. Abstrak [BACK]
Percobaan ini menyajikan prosedur otomatis untuk menyesuaikan gain dari kontroler Proportional-Integral-Derivative (PID). Algoritma Genetika digunakan untuk menyetel pengontrol ini sehingga spesifikasi closed loop step respons terpenuhi.
2. Pendahuluan [BACK]
- Algoritma Genetika digunakan untuk mencari gain pengontrol Kp (gain proporsional), Ki (gain integral) dan Kd (gain turunan atau diferensial) sehingga spesifikasi untuk respons langkah loop tertutup terpenuhi.
3. Tinjauan Pustaka [BACK]
KENDALI PID
Berikut merupakan gambaran sistem kendali PID:


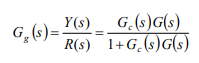
Untuk rangkaian closed-loop, transfer function adalah:
Penyetelan kontroler PID terdiri dari pemilihan gain Kp, Ki dan Kd agar spesifikasi kinerja terpenuhi. Dengan menggunakan metode Ziegler-Nichols untuk penyetelan PID, gain tersebut diperoleh melalui eksperimen dengan proses terkendali. Step response dan nilai Kp yang menghasilkan stabilitas marjinal digunakan sebagai titik awal untuk memperoleh nilai gain yang menjamin perilaku yang memuaskan.
ALGORITMA GENETIKA
Algoritma Genetika menyediakan mekanisme pencarian adaptif yang terinspirasi dari prinsip Darwin tentang reproduksi dan survival of the fittest. Individu (solusi) dalam suatu populasi diwakili oleh kromosom; masing-masing dikaitkan dengan nilai kebugaran (evaluasi masalah). Kromosom mengalami proses evolusi yang membutuhkan beberapa siklus. Operasi dasar adalah seleksi, reproduksi, crossover dan mutasi. Pemilihan induk memberikan lebih banyak peluang reproduksi kepada individu yang paling cocok. Selama persilangan, beberapa individu yang direproduksi menyilang dan bertukar karakteristik genetiknya. Mutasi dapat terjadi dalam persentase kecil dan menyebabkan perubahan acak pada materi genetik, sehingga berkontribusi untuk memperkenalkan variasi dalam populasi. Proses evolusi memandu algoritme genetik melalui wilayah yang lebih menjanjikan di ruang pencarian.
4. Metode [BACK]
Metode Ziegler-Nichol
Metode Ziegler-Nichols adalah salah satu metode yang digunakan dalam pengaturan atau tuning kontroler proporsional-integral-derivative (PID). Metode ini pertama kali diperkenalkan oleh John G. Ziegler dan Nathaniel B. Nichols pada tahun 1942. Tujuan dari tuning kontroler PID adalah untuk mendapatkan respons sistem yang cepat, stabil, dan memiliki overshoot (perlewatan) dan osilasi yang minimal.
Tahapan dalam mendapatkan nilai PID menggunakan Ziegler-Nichols adalah
1. Memberi nilai gain
Sistem yang dibuat, diberi gain dengan nilai bebas, akan tetapi saat output yang dihasilkan berosilasi dengan nilai gelombang yang sma, maka nilai tersebut disimpan dengan nama K_cr, dan periode osilasi diberi nama P_cr
2. Mendapatkan nilai PID
Nilai PID didapatkan dari nilai K_cr, dimana
Kp = 0.6 x K_cr
Ki= Kp/(0.5 x P_cr)
Kd = Kp x (0.125 x P_cr)
Metode Algoritma Genetika
Implementasi prosedur tuning melalui algoritma genetik dimulai dengan definisi representasi kromosom. Seperti yang diilustrasikan pada Gambar dibawah, kromosom dibentuk oleh tiga nilai yang sesuai dengan tiga gain yang akan disesuaikan untuk mencapai perilaku yang memuaskan. Perolehan Kp , Ki dan Kd merupakan bilangan real dan mencirikan individu yang akan dievaluasi.

Karena tujuannya adalah untuk meminimalkan kesalahan antara setpoint (output yang diinginkan) dan output plant (output aktual), fungsi fitness telah didefinisikan sebagai:
Algoritma Genetika yang digunakan memiliki beberapa properti yaitu:
Population = 50
Generation = 100
Crossover = 0.8 (aritmatika dan one-point)
Mutation = 0.06
Plant 1

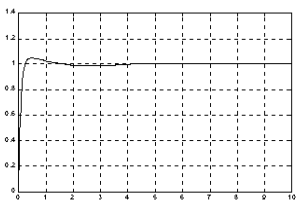
Gain dengan Kp = 4.0, Ki = 5.0 dan Kd = 3.11 diperoleh setelah 100 generasi dari populasi 50 individu. Keuntungan diizinkan untuk mengambil nilai dalam kisaran dari 0 hingga 100.
Plant 2
Eksperimen kedua dilakukan dengan plant yang dijelaskan oleh fungsi transfer yang dinyatakan oleh persamaan dibawah.


Plant 3
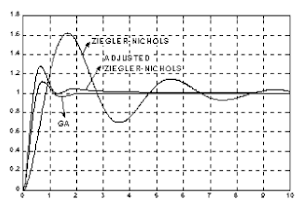
Pada plant 3 digunakan plant yang mana time-delay nya juga diperhitungkan.


Dapat dilihat bahwasanya dibandingkan dengan Ziegler-Nichols, AG memiliki respon yang lebih cepat dengan settling time dan overshoot yang sama.
Plant 4
Pada plant 4, persamaan yang digunakan tidak dapat diselesaikan dengan metode Ziegler-Nichols, akan diterapkan metode AG.


Dapat diamati bahwa respon yang diberikan oleh kontroler PID yang disetel melalui algoritma genetik agak mendekati yang diinginkan. Ini jauh lebih cepat daripada respons step loop tertutup tanpa kompensasi, dengan overshoot minimal.
6. Kesimpulan [BACK]
Percobaan ini terdiri dari melakukan serangkaian eksperimen untuk menyelidiki penerapan algoritma genetika pada penyetelan otomatis pengontrol PID. Metode ini mencari kombinasi perolehan sehingga kesalahan antara respons aktual dan respons yang diinginkan dapat diminimalkan.
Percobaan yang dapat dilakukan di masa depan akan mencakup investigasi dengan plant yang lebih kompleks dan nyata. Teknik algoritma genetika untuk optimisasi multi-objektif juga akan digunakan dalam percobaan lebih lanjut
7. Daftar Pustaka [BACK]
Jose F. Amaral, Ricardo Tanscheit, Marco A. C. Pacheco, "Tuning PID Controller through Genetic Algorithms", Department of Electronics and Telecommunications Engineering Rio de Janeiro State University.
8. Video Percobaan Simulasi [BACK]
9. Link Download [BACK]
Download file Simulink disini
Download file matlab disini


No comments:
Post a Comment