(Mr. Darwison & Mr. Zaini Lecturer Assistant)
Name: Muhammad Dafa
Student ID: 2010951044
Sistem Kendali Mesin Emulsifying Mixer Menggunakan Fuzzy Logic
Sistem Kendali Mesin Emulsifying
Mixer Menggunakan Fuzzy Logic
Referensi :
Mustofa Fajar, dan Muhammad Reza Hidayat (2020). "Sistem Kendali Mesin Emulsifying Mixer Menggunakan Fuzzy Logic Tipe Mamdani". Jurnal Teknologi Rekayasa, Sukabumi. Vol. 5, No.1, pp. 93-100.
Otomatisasi dalam suatu pengontrolan sebuah alat sudah menjadi keharusan terutama di dalam sebuah industri. Saat ini banyak terdapat mesin yang masih memerlukan campur tangan manusia seperti contoh dalam memantau suhu atau viskositas suatu produk. Salah satunya adalah mesin emulsifying mixer.Tujuan dari penelitian ini adalah untuk merancang sistem kendali mesin emulsifying mixer menggunakan fuzzy logic tipe Mamdani dengan input berupa sensor suhu dan sensor pH dengan keluaran berupa putaran kecepatan motor sebagai pengaduk bahan sehingga output yang dikeluarkan sesuai dengan fuzzy rule tipe Mamdani.
Sering kali dalam melakukan proses produksi, waktu dalam melakukan proses pencampuran bahan menjadi hal yang penting untuk dilihat seberapa efisien dalam sekali proses. Contohnya emulsifying mixer. Pada emulsifying mixer, diperlukan sistem kendali agar dapat berkerja secara otomatis. Salah satu metode yang digunakan adalah fuzzy logic. Proses pengontrolannya dengan masukan berupa suhu dengan derajat keasaman. Hasil pengontrolan berupa putaran motor yang bergerak sebagai pengaduk larutan berupa zat cair dengan beberapa jenis cairan yang digabung mesin akan mengatur waktu pengadukan secara otomatis tanpa memerlukan lagi sebuah timer sehingga akan membuat efisiensi dalam melakukan pekerjaan proses produksi pencampuran bahan.
Gambar 1 merupakan plant emulsifying mixer tank yang akan dikendalikan pada penelitian ini. Pada sistem tersebut terdapat tiga tangki yaitu water tank, water heater tank, dan emulsifier mixer tank.
b. Perancangan Perangkat Keras
Diagram blok perangkat keras yang dirancang dapat dilihat pada Gambar 2. Seperti dapat dilihat bahwa sistem yang dibuat menggunakan sistem loop terbuka dengan dua buah masukan dan satu keluaran.
c. Perancangan Perangkat Lunak
Gambar 3 menunjukan proses kontrol plant system mixer saat bekerja. Sensor thermocouple berfungsi untuk membaca suhu yang terpantau di dalam tangki dan sensor pH mendeteksi derajat keasaman di dalam tangki tersebut. Nilai input suhu dari thermocouple dan nilai input pH dari sensor pH masuk ke mikrokontroler kemudian akan diproses dua nilai tersebut menggunakan Fuzzy Inference System (FIS) tipe Mamdani.
d. Perancangan Fuzzy Logic
Pada perancangan fuzzy logic ini, peneliti menggunakan jenis fungsi keanggotaan trapezium yang dinyatakan dengan persamaan sebagai berikut:
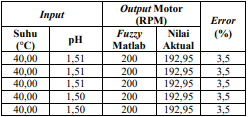
Fuzzy Matlab menghasilkan nilai RPM sebesar 200 RPM, sedangkan untuk nilai aktual menghasilkan output RPM sebesar 192,95 RPM. Nilai error yang didapat rata-rata sebesar 3,5% sebanyak lima kali percobaan. Untuk perhitungan nilai error diperoleh berdasarkan persamaan berikut:
Pada pengujian yang telah dilakukan didapati bahwa nilai error yang terjadi dengan mengambil sampel sebanyak lima percobaan terdapat nilai error sebesar 3,5 % antara simulasi dengan pada plant.
Prosedur Percobaan
STEP 1 : Susun konsep sistem kontrol dengan logika fuzzy
STEP 2 : Setelah konsep sistem kontrol dibentuk, maka kita dapat membuat pemrogramannya. Ketiklah “fuzzy” pada command window untuk membuka jendela Fuzzy Inference System (FIS) editor, sehingga muncul tampilan seperti gambar di bawah ini:
sehingga akan muncul tampilan seperti pada gambar di bawah ini:
STEP 4 : Ubahlah nama input1 menjadi Thermocouple, input2 menjadi PH sensor dan output1 menjadi kecepatan motor
STEP 5 : Pilih edit >> membership function untuk membuat fungsi keanggotaan setiap variabel
sehingga akan muncul tampilan Membership Function Editor seperti pada gambar di bawah ini:
STEP 6 : Pada variabel thermocoupule, ubahlah
range menjadi [0 70],
nama mf1 menjadi dingin, type trapmf, Params [0 0 20 30]
nama mf2 menjadihangat, typetrapmf, Params [20 30 40 50]
nama mf3 menjadi panas, typetrapmf, Params [40 50 70 70]
sehingga tampilan variabel termocouple akan tampak seperti pada gambar di bawah ini:
STEP 7 : Pada variabel PH, ubahlah range menjadi [0 14]
nama mf1 menjadi asam, type trapmf, Params [0 0 5.5 6.5]
nama mf2 menjadi netral, type trapmf, Params [5.7 6.2 8 8.5]
nama mf3 menjadi basa, type trapmf, Params [7.7 8.8 14 14]
sehingga tampilan variabel pH akan tampak seperti pada gambar di bawah ini:
STEP 8 : Pada variabel kecepatan motor, ubahlah range menjadi [0 600],
nama mf1 menjadi lambat, type trapmf, Params [0 0 100 150]
nama mf2 menjadi sedang, type trapmf, Params [100 150 250 300]
nama mf3 menjadi cepat, type trapmf, Params [250 300 600 600]
Sehingga tampilan variabel kecepatan motor akan tampak seperti pada gambar di bawah ini:
STEP 9 : Pilih edit >> rules untuk membuka jendela rule editor
buatlah aturan pada rule editor sesuai dengan konsep sistem kontrol yang sebelumnya telah dibuat. Misalnya if (thermocouple is dingin) and (sensor ph is asam) then (kecepatan motor is lambat), dan seterusnya sampai dengan9 rules.
STEP 10 : Pilih view >> rules, untuk melihat hasil rules yang telah kita buat
kita dapat menggeser-geser nilai thermocouple (input1) dan sensor pH (input2) sehingga menghasilkan nilai keluaran pada kecepatan motor (output)
STEP 11: Pilih view >> surface, untuk melihat grafik 3D antara thermocouple, pH, dan keepatan motor
Berdasarkan dari hasil pengujian yang dilakukan, sistem kontrol pada miniatur emulsifying mixer tank ini menghasilkan output yang stabil dan 192,95 RPM. Pada saat suhu heater 40 derajat celcius juga berkesesuaian dengan nilai simulasi Matlab sebesar 200 RPM pada saat suhu heater 40 derajat celcius.Selisih yang didapatkan dari nilai aktual fuzzy Arduino Uno dan fuzzy simulasi Matlab memiliki rata-rata error dengan nilai yang stabil sebesar 3,5% selama dari lima kali percobaan.
Berdasarkan percobaan ketika suhu 40 derajat celcius dan pH 1,5 didapatkan hasil matlab sebesar 200 RPM untuk kecepatan motor sedangkan nilai aktualnya hanya 192,25 RPM sehingga diperoleh nilai error sebesar 3,5%. Dikarenakan percobaan yang dilakukan hanya menggunakan 3 variabel dari masing-masing baik input maupun output dan masih dalam bentuk simetris, maka dapat dilakukan penambahan membership function sehingga error yang diperoleh semakin kecil sehingga kecepatan motor dari sistem kendali emulsifying mixer akan semakin smooth.
Dalam melakukan saran ini dilakukan penambahan masing-masing input sebanyak 7 membership function. dari penambahan tersebut dengan dalam bentuk tidak simetris diperoleh hasil yang lebih mendekati nilai aktual yakni sebelumnya nilai yang terbaca pada matlab adalah 200 RPM dan setelah diperbaiki dengan menambahkan inputnya menjadi 7 menjadi 195 RPM. Hal ini dapat terlihat seperti pada gambar di bawah ini :
Dari gambar diatas, apabila kita bandingkan nilai yang diperoleh dengan nilai aktual menggunakan rumus di bawah ini :
Maka, diperoleh nilai errornya sebesar 1,41%. Dimana hal ini seudah lebih baik dibandingkan dengan di jurnal dan hasil kecepatan motor pada emulsifying mixer yang dihasilkan jauh lebih smooth dibandingkan dengan yang di jurnal.
B. S. Siregar, A. N. Jati, and D. Darlis, “AnalisisLogika Fuzzy Sebagai Metode Kendali Pada MesinPencampuranZatCair,”e-ProceedingofEngineering,vol.2,no.1,pp.625-630,2015.
D.L.Rahakbauw,F.J.Rianekuay,andY.A.Lesnussa,“PenerapanMetodeFuzzyMamdaniuntuk Memprediksi Jumlah Produksi Karet (StudiKasus: Data Persediaan Dan Permintaan ProduksiKaretpada PTPNusantara XIV (Persero)KebunAwaya,TelukElpaputih,Maluku-Indonesia),”Jurnal Ilmiah Matematika dan Terapan, vol. 16, no.1,pp.119-127,2019.
R.N.Aini,“OptimasiKonsentrasiPengemulsiTerhadap Tingkat Pengembangan dan Daya TerimaRotiTawarBerbahanDasarTepungSingkong,” DisertasiDoktor,UniversitasMuhammadiyahSurakarta,2015.
A. F. Saragih, P. Pangaribuan, and A. S. Wibowo,“SistemKendaliMixerOtomatisdiIndustriMakanan,” e-Proceeding of Engineering, vol. 4, no.3,pp.3106-3113,2017.
A. F. Saragih, P. Pangaribuan, and A. S. Wibowo, “Sistem Kendali Mixer Otomatis di Industri Makanan,” e-Proceeding of Engineering, vol. 4, no. 3, pp. 3106-3113, 2017.
F.Suryatini,M.Maimunah,andF.I.Fauzandi,“ImplementasiSistemKontrolIrigasiTetesMenggunakan Konsep IoT Berbasis Logika FuzzyTakagi-Sugeno,”JTERA(JurnalTeknologiRekayasa),vol.4,no.1,pp.115-124,2019.
S.Romadhan,B.Setiyono,andS.Sumardi,“MenggunakanKontrolFuzzyUntukPengaturanSuhu Cairan Berbasis Atmega16,” Transient, vol. 3,no.4, pp.90-95,2014.
M. Abrori and A. H. Prihamayu, “Aplikasi LogikaFuzzyMetodeMamdanidalamPengambilanKeputusanPenentuanJumlahProduksi,”Kauniavol.XI,no.2,pp.91-99,2015.
I.S.Doraya,“PengaruhEmulsifierTerhadapStabilitasEmulsiSaladDressingdariMinyakKedelaidanAirJerukLemon,”TugasAkhirDiploma Fakultas Teknik, UniversitasDiponegoro,Semarang,2012.
I. W. R. Ardana and I. P. Sutawinaya, “PemodelanSistemKontrolerLogikaFuzzyPadaPengaturanKecepatan Motor Induksi Menggunakan PerangkatLunak Matlab/Simulink,” Jurnal Matrix, vol. 7, no.1,pp.1-6,2017.
J.NasirandJ.Suprianto,“AnalisisFuzzyLogicMenentukanPemilihanMotorHondaDenganMetode Mamdani,” Penelitian BidangKomputer Sains dan Pendidikan Informatika, vol. 3,no.2,pp.177-186,2017.
B. Fechera, J. Kustija, and S. Elvyanti, “OptimasiPenggunaanMembershipFunctionLogikaFuzzypadaKasusIdentifikasiKualitasMinyakTransformator,” Electrans, vol. 11, no. 2, pp. 27-35,2012.
A. Adriansyah and O. Hidyatama, “Rancang BangunPrototipeElevatorMenggunakanMicrocontrollerArduino Atmega 328p”, Jurnal Teknologi Elektro,vol.4,no.3,pp.100-112,2013.



























No comments:
Post a Comment