
Arduino merupakan sebuah perangkat elektronik yang bersifat open source dan sering digunakan untuk merancang dan membuat perangkat elektronik serta software yang mudah untuk digunakan. Arduino ini dirancang sedemikian rupa untuk mempermudah penggunaan perangkat elektronik di berbagai bidang.
Arduino ini memiliki beberapa komponen penting di dalamnya, seperti pin, mikrokontroler, dan konektor yang nanti akan dibahas lebih dalam selanjutnya. Selain itu, Arduino juga sudah menggunakan bahasa pemrograman Arduino Language yang sedikit mirip dengan bahasa pemrograman C++.
A. Bagian-bagian arduino uno:
1. Power USB
Digunakan untuk menghubungkan PapanArduino dengan komputer lewat koneksi USB
2. Power jack
Supply atau sumber listrik untuk Arduino dengan tipe Jack. Input DC 5 - 12 V.
3. Crystal Oscillator
Kristal ini digunakan sebagai layaknya detak jantung pada Arduino. Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau 16 MHz.
4. Reset
Digunakan untuk mengulang program Arduino dari awal atau Reset.
5. Digital Pins I / O
Papan Arduino UNO memiliki 14 Digital Pin. Berfungsi untuk memberikan nilai logika ( 0 atau 1 ). Pin berlabel " ~ " adalah pin-pin PWM ( Pulse Width Modulation ) yang dapat digunakan untuk menghasilkan PWM.
6. Analog Pins
Papan Arduino UNO memiliki 6 pin analog A0 sampai A5. Digunakan untuk membaca sinyal atau sensor analog seperti sensor jarak, suhu dsb, dan mengubahnya menjadi nilai digital.
7. LED Power Indicator
Lampu ini akan menyala dan menandakan Papan Arduino mendapatkan supply listrik dengan baik.
Bagian-Bagian Pendukung
1. RAM
RAM (Random Access Memory) adalah tempat penyimpanan sementara pada komputer yang isinya dapat diakses dalam waktu yang tetap, tidak memperdulikan letak data tersebut dalam memori atau acak. Secara umum ada 2 jenis RAM yaitu SRAM (Static Random Acces Memory) dan DRAM (Dynamic Random Acces Memory).
2. ROM
ROM (Read-only Memory) adalah perangkat keras pada computer yang dapat menyimpan data secara permanen tanpa harus memperhatikan adanya sumber listrik. ROM terdiri dari Mask ROM, PROM, EPROM, EEPROM.
2.2 Breadboard
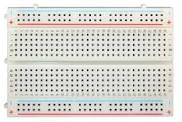
Breadboard merupakan sebuah board atau papan yang berfungsi untuk merancang sebuah rangkaian elektronik sederhana. Breadboard tersebut nantinya akan dilakukan prototipe atau uji coba tanpa harus melakukan solder.

- Kabel Jumper Male to Male

- Kabel Jumper Male to Female

Biasanya kabel ini digunakan untuk menghubungkan komponen elektronika selain arduino ke breadboard
- Kabel Jumper Female to Female


Potensiometer (POT) adalah salah satu jenis Resistor yang Nilai Resistansinya dapat diatur sesuai dengan kebutuhan rangkaian elektronika ataupun kebutuhan pemakainya. Sebuah Potensiometer (POT) terdiri dari sebuah elemen resistif yang membentuk jalur (track) dengan terminal di kedua ujungnya. Sedangkan terminal lainnya (biasanya berada di tengah) adalah Penyapu (Wiper) yang dipergunakan untuk menentukan pergerakan pada jalur elemen resistif (Resistive). Pergerakan Penyapu (Wiper) pada Jalur Elemen Resistif inilah yang mengatur naik-turunnya Nilai Resistansi sebuah Potensiometer. Simbol dan bentuk Potensiometer dapat dilihat pada gambar 9 berikut. Gambar Bentuk dan Simbol Potensiometer
Gambar Bentuk dan Simbol Potensiometer


IC L293D adalah IC yang didesain khusus sebagai driver motor DC dan dapat dikendalikan dengan rangkaian TTL maupun mikrokontroler. Motor DC yang dikontrol dengan driver IC L293D dapat dihubungkan ke ground maupun ke sumber tegangan positif karena di dalam driver L293D sistem driver yang digunakan adalah totem pool. Dalam 1 unit chip IC L293D terdiri dari 4 buah driver motor DC yang berdiri sendiri sendiri dengan kemampuan mengalirkan arus 1 Ampere tiap drivernya. Sehingga dapat digunakan untuk membuat driver H-bridge untuk 2 buah motor DC. Konstruksi pin driver motor DC IC l293D adalah sebagai berikut.
Konstruksi Pin Driver Motor DC IC L293D

Fungsi Pin Driver Motor DC IC L293D
1. Pin EN (Enable, EN1.2, EN3.4) berfungsi untuk mengijinkan driver menerima perintah untuk menggerakan motor DC.
2. Pin In (Input, 1A, 2A, 3A, 4A) adalah pin input sinyal kendali motor DC 3. Pin Out (Output, 1Y, 2Y, 3Y, 4Y) adalah jalur output masing-masing driver yang dihubungkan ke motor DC 4. Pin VCC (VCC1, VCC2) adalah jalur input tegangan sumber driver motor DC, dimana VCC1 adalah jalur input sumber tegangan rangkaian kontrol dirver dan VCC2 adalah jalur input sumber tegangan untuk motor DC yang dikendalikan. 5. Pin GND (Ground) adalah jalu yang harus dihubungkan ke ground, pin GND ini ada 4 buah yang berdekatan dan dapat dihubungkan ke sebuah pendingin kecil.
Rangkaian Aplikasi Driver Motor DC IC L293D

Pada gambar driver IC L293D diatas adalah contoh aplikasi dari keempat unit driver motor DC yang dihubungkan secar berbeda sesuai dengan keinginan dan kebutuhan.
2.7 Motor DC
Motor DC adalah motor listrik yang memerlukan suplai tegangan arus searah pada kumparan medan untuk diubah menjadi energi gerak mekanik. Kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Motor arus searah, sebagaimana namanya, menggunakan arus langsung yang tidak langsung/direct- unidirectional. Motor DC adalah piranti elektronik yang mengubah energi listrik menjadi energi mekanik berupa gerak rotasi. Pada motor DC terdapat jangkar dengan satu atau lebih kumparan terpisah. Tiap kumparan berujung pada cincin belah (komutator). Dengan adanya insulator antara komutator, cincin belah dapat berperan sebagai saklar kutub ganda (double pole, double throw switch). Motor DC bekerja berdasarkan prinsip gaya Lorentz, yang menyatakan ketika sebuah konduktor beraliran arus diletakkan dalam medan magnet, maka sebuah gaya (yang dikenal dengan gaya Lorentz) akan tercipta secara ortogonal diantara arah medan magnet dan arah aliran arus. Kecepatan putar motor DC (N) dirumuskan dengan Persamaan berikut.
 Gambar Rumus Kecepatan Putar Motor DC
Gambar Rumus Kecepatan Putar Motor DC Simbol Motor DC

Gambar Simbol Motor DC
Motor DC tersusun dari dua bagian yaitu bagian diam (stator) dan bagian bergerak (rotor). Stator motor arus searah adalah badan motor atau kutub magnet (sikat-sikat), sedangkan yang termasuk rotor adalah jangkar lilitanya. Pada motor, kawat penghantar listrik yang bergerak tersebut pada dasarnya merupakan lilitan yang berbentuk persegi panjang yang disebut kumparan.
Prinsip Kerja Motor DC

Gambar Prinsip Kerja Motor DC
Kumparan ABCD terletak dalam medan magnet serba sama dengan kedudukan sisi aktif AD dan CB yang terletak tepat lurus arah fluks magnet. Sedangkan sisi AB dan DC ditahan pada bagian tengahnya, sehingga apabila sisi AD dan CB berputar karena adanya gaya lorentz, maka kumparan ABCD akan berputar. Hasil perkalian gaya dengan jarak pada suatu titik tertentu disebut momen, sisi aktif AD dan CB akan berputar pada porosnya karena pengaruh momen putar (T). Setiap sisi kumparan aktif AD dan CB pada gambar diatas akan mengalami momen putar sebesar :
T = F.r
Dimana :
T = momen putar (Nm) F = gaya tolak (newton)
r = jarak sisi kumparan pada sumbu putar (meter)
Pada daerah dibawah kutub-kutub magnet besarnya momen putar tetap karena besarnya gaya lorentz. Hal ini berarti bahwa kedudukan garis netral sisi sisi kumparan akan berhenti berputar. Supaya motor dapat berputar terus dengan baik, maka perlu ditambah jumlah kumparan yang digunakan. Kumparan- kumparan harus diletakkan sedemikian rupa sehingga momen putar yang dialami setiap sisi kumparan akan saling membantu dan menghasilkan putaran yang baik. Dengan pertimbangan teknis, maka kumparan-kumparan yang berputar tersebut dililitkan pada suatu alat yang disebut jangkar, sehingga lilitan kumparan itupun disebut lilitan jangkar. Struktur Motor DC dapat dilihat pada gambar berikut ini. 
Gambar Struktur Motor DC
1. Pin EN (Enable, EN1.2, EN3.4) berfungsi untuk mengijinkan driver menerima perintah untuk menggerakan motor DC.
Rangkaian Aplikasi Driver Motor DC IC L293D

Pada gambar driver IC L293D diatas adalah contoh aplikasi dari keempat unit driver motor DC yang dihubungkan secar berbeda sesuai dengan keinginan dan kebutuhan.

Simbol Motor DC

Gambar Simbol Motor DC
Motor DC tersusun dari dua bagian yaitu bagian diam (stator) dan bagian bergerak (rotor). Stator motor arus searah adalah badan motor atau kutub magnet (sikat-sikat), sedangkan yang termasuk rotor adalah jangkar lilitanya. Pada motor, kawat penghantar listrik yang bergerak tersebut pada dasarnya merupakan lilitan yang berbentuk persegi panjang yang disebut kumparan.

Gambar Prinsip Kerja Motor DC
Kumparan ABCD terletak dalam medan magnet serba sama dengan kedudukan sisi aktif AD dan CB yang terletak tepat lurus arah fluks magnet. Sedangkan sisi AB dan DC ditahan pada bagian tengahnya, sehingga apabila sisi AD dan CB berputar karena adanya gaya lorentz, maka kumparan ABCD akan berputar.
T = F.r
Dimana :
T = momen putar (Nm) F = gaya tolak (newton)
r = jarak sisi kumparan pada sumbu putar (meter)
Pada daerah dibawah kutub-kutub magnet besarnya momen putar tetap karena besarnya gaya lorentz. Hal ini berarti bahwa kedudukan garis netral sisi sisi kumparan akan berhenti berputar. Supaya motor dapat berputar terus dengan baik, maka perlu ditambah jumlah kumparan yang digunakan. Kumparan- kumparan harus diletakkan sedemikian rupa sehingga momen putar yang dialami setiap sisi kumparan akan saling membantu dan menghasilkan putaran yang baik. Dengan pertimbangan teknis, maka kumparan-kumparan yang berputar tersebut dililitkan pada suatu alat yang disebut jangkar, sehingga lilitan kumparan itupun disebut lilitan jangkar.


#define in1 10 #define in2 9 void setup() { pinMode(in1, OUTPUT); pinMode(in2, OUTPUT); } void loop() { digitalWrite(in1, HIGH); digitalWrite(in2, LOW); delay(1000); digitalWrite(in1, LOW); digitalWrite(in2, LOW); delay(1000); digitalWrite(in1, LOW); digitalWrite(in2, HIGH); delay(1000); digitalWrite(in1, LOW); digitalWrite(in2, LOW); delay(1000); }
PENJELASAN PROGRAM :Pada listing program ini terlebih dahulu mendeklarasikan pin 10 & pin 9 untuk input 1 & input 2 dengan cara #define in1 10 & #define in2 9 . Selanjutnya,
kita akan menggunakan fungsi void setup() dimana semua kode didalam fungsi ini akan dieksekusi
sekali. Di dalam fungsi ini terdapat pinMode(in1, OUTPUT); dan pinMode(in2, OUTPUT);
yang menunjukkan bahwa in1 & in2 sebagai OUTPUT. Selanjutnya kita menggunakan
fungsi void loop() dimana semua kode di dalam fungsi ini akn dieksekusi secara berulang.
Di dalam fungsi ini terdapat berapa kondisi untuk in1 & in2 dimana :
A. digitalWrite(in1, HIGH); & digitalWrite(in2, LOW); memberi inputan 1 logika HIGH(1)
dan inputan 2 logika LOW (0) kemudian delay(1000); diberi jeda selama 1000ms sebelum code selanjutnya
B. digitalWrite(in1, LOW); & digitalWrite(in2, LOW); memberi inputan 1 logika LOW(0)dan inputan 2 logika LOW (0) kemudian delay(1000); diberi jeda selama 1000ms sebelum code selanjutnyaC. digitalWrite(in1, LOW); & digitalWrite(in2, HIGH); mmemberi inputan 1 logika LOW(0)dan inputan 2 logika HHIGH (1) kemudian delay(1000); diberi jeda selama 1000ms sebelum code selanjutnya
Setelah listing program dibuat maka kita sebelum menguploadnya, kita hubungkan menggunakan kabel USB dari Arduino ke Laptop . Setelah itu kita upload dan dapat terlihat bahwa pada percobaan 1 terlihat bahwa ketika kita menggunakan potensiometer akan mempengaruhi kecepatan dari motor DC. Dimana pengaruh potensiometer terhadap pergerakan motor berbanding lurus yakni ketika kita tambah potensiometernya (di putar ke kanan) maka pergerakan motornya akan semakin cepat , sedangkan ketika kita kurangi potensiometernya (di putar ke kiri atau di mundurin) maka pergerakan motornya akan semakin lambat. Selain itu, dari program dengan kita memberikan kondisi awal in1 logika HIGH (1) dan in2 logika LOW (0) akan menyebabkan motornya akan bergerak searah jarum jam (clock wise) dan diberi jeda 1000ms sebelum kondisi selanjutnya. Selanjutnya, ketika kondisi kedua kita memberikan in1 logika LOW (0) dan in2 logika LOW (0) maka akan menyebabkan motornya mati dan diberi jeda 1000ms sebelum kondisi selanjutnya. Setelah itu, ketika memberikan kondisi ketiga in1 logika LOW (0) dan in2 logika HIGH (1) maka akan menyebabkan motornya bergerak berlawanan arah jarum jam (counter clock wise) dan diberi jeda 1000ms sebelum kondisi selanjutnya. Dan kondisi terakhir kita kembali memberikan in1 logika LOW (0) dan in2 logika LOW (0) maka akan menyebabkan motornya mati dan diberi jeda 1000ms sebelum perulangan selanjutnya, begitu selanjutnya untuk looping pada percobaan ini. 5. Video Rangkaian [Kembali]
- Alasan mengapa kita menghubungkan input L293D ke pin 9 dan 10 karena kita akan mengendalikan kecepatan motor dengan driver motor L293D dimana kita akan mengaplikasikan fungsi PWM. Sehingga kita menghubungkannya ke pin 9 & 10 yang merupakan pin yang termasuk untuk PWM yang ditandai tanda tilde (~) di pinnya.
- Untuk boleh atau tidaknya dihubungkan ke pin lain adalah boleh, dimana syaratnya adalah dihubungkan ke pin yang bisa digunakan untuk PWM selain pin 9 & 10 seperti pin 3,5,6, dan 11 yang ditandai dengan tanda tilde (~) di pinnya.
7. Link Download [Kembali]
- Download File HTML klik disini
- Download Listing Program Arduino klik disini
- Download Video Percobaan klik disini
- Download Datasheet BreadBoard klik disini
- Download Datasheet Motor Driver L293D klik disini
- Download Datasheet Arduino Uno klik disini
- Download Datasheet Potensiometer klik disini
- Download Datasheet Motor DC klik disini
- Download Library Arduino UNO klik disini


{kind=link}
No comments:
Post a Comment